
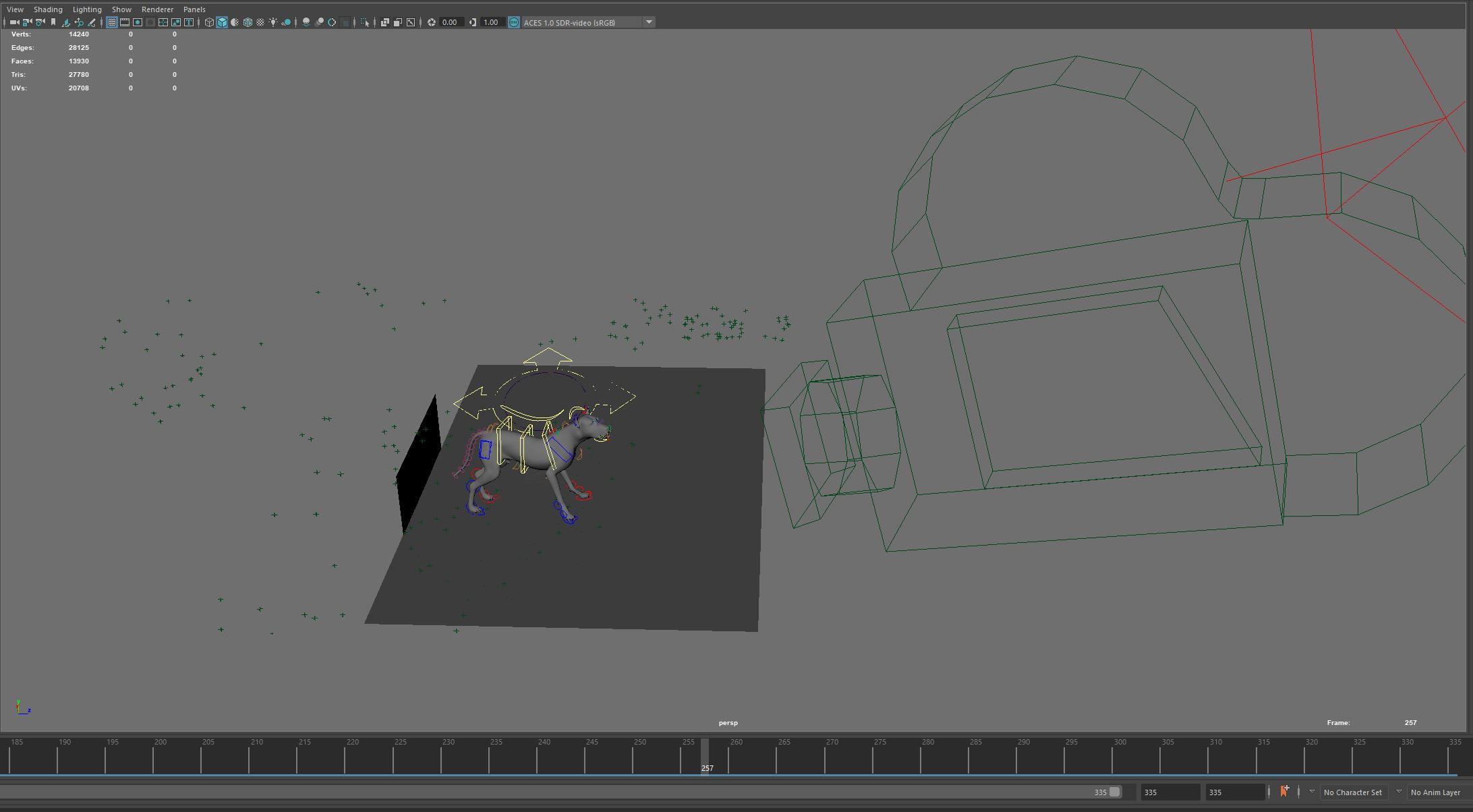



This is an animation project for university which was expanded with 3D tracking and rendering on a voluntary basis. The goal was to animate an animal with 4 legs walking.
The Doberman Rig is not part of my work.

This is an animation project for university which was expanded with 3D tracking and rendering on a voluntary basis. The goal was to animate an animal with 4 legs walking.
The Doberman Rig is not part of my work.
